ハンディSLAMスキャナ Cygnus
ハンディSLAMスキャナ Cygnus
特徴
SATLABの新しいモバイル3D スキャナーCygnusは、最新の SLAM (Simultaneous Localization And Mapping) テクノロジーと効率的かつ革新的なアルゴリズムを組み合わせることにより、3D点群データの取得効率を最大限に向上させる ことができました。
- GNSS 信号のない屋外、屋内、地下、またはその他の非常に遮蔽されたエリアでも、データの取得が可能です。
- リアルタイムデータを迅速に処理し、データのプレビューを可能にします。
- 複数のデータ後処理機能をサポートします。
- 鉱業、林業、地下デジタル化、建設、および 3D モデリングを必要とする様々な用途に使用可能です。
スピーディで正確な計測

スキャン範囲は最大 120m、毎秒 320,000 ポイント。 Cygnus ハンドヘルド SLAM スキャナは、360°x 285° の広い視野と低反射率範囲の大幅な拡大により、 様々な環境下でより短時間で正確かつ完全なスキャンを可能としました。
リアルタイムで迅速なデータ処理

独自のリアルタイム デコード アルゴリズムにより、スキャンプロセス中にSLAM処理をリアルタイムに実行できます。
スキャンが完了後、データをデータロガー内で処理を行うことが出来ます。
処理完了後は、直接LASなどの形式でエクスポートできるため、作業効率が大幅に向上します。
強力なモバイル ソフトウェア

SLAM Manager アプリを利用することで、リアルタイムの点群データ表示が可能になります。 スキャン後の処理・点群生成における各種設定もアプリから行うことが出来ます。
360度パノラマカメラ

Cugnus専用のパノラマカメラです。スキャン後、データロガー内での処理時に、点群のカラー化も同時に行われます。処理完了後は、カラー化されていない点群と同様、直接LAS形式でエクスポート可能です。
堅牢な設計と高い信頼性
耐久性のある設計と頑丈な構造により、Cygnusは -20℃ から 60℃ までの過酷な環境で効果的に機能する完璧なツールとなっています。 軽量・コンパクトなボディにより、ハンドヘルド・バックパックでの使用や、ドローン・車両への組込など、柔軟な運用が可能です。さまざまな運用シナリオ の要件を満たします。
各種アタッチメント(オプション)
各種アタッチメントを使用することで、バックパックでの使用や、ドローン・車両への組込など、柔軟な運用が可能です。さまざまな運用シナリオの要件を満たします。

UAVプラットフォームアダプター : より効率的なデータ収集のためにUAVプラットフォームを完全にサポート。
RTKバックパック : 点群を正確に取得するためのGNSSRTKシステムを備えたバックパック。
車両ブラケット : 車両への取付を簡単に行えるアタッチメント。
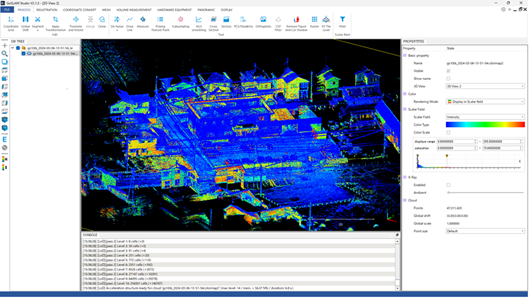
GOSLAM(デスクトップソフトウェア)
リアルタイム3Dモデリング、表示、後処理のための強力でインテリジェントなソフトウェア。
観測点群の後処理
スキャン中に現場内の既知点を登録することにより、点群の座標付けを行います。
オプションのRTKバックパックを使用すれば、GNSS観測データと統合して点群の座標付けが可能です。
フィルタリング機能
観測点群をより良い品質に向上させる多彩なフィルタリング機能を備えています。これらのツールによって移動体の除去・スムージング・異常値の除去等を行う事ができます。
編集・計算機能
点群の切り取りや結合などの編集機能や、土量計算や任意の断面を作成、距離等の計測機能を実装しています。