ハンディSLAMスキャナ Cygnus
ハンディSLAMスキャナ Lixel X1
特徴

軽量・コンパクトに設計された LixelX1 、 SatLab の次世代 SLAM 技術を搭載したハンドヘルドSLAMスキャナーです。シンプルな操作手順で、簡単に点群を取得し、
正確なモデルを直接生成できます。
独自開発した LixelX1 3D SLAMアルゴリズムは、リアルタイムデータプレビュー、データを収集しながらのモデル構築、後処理不要で直接エクスポートする機能などをサポートし、
画期的な技術でデジタル時代を推進します
コンパクトな設計と最小限の操作
LixelX1 は、LIDAR、可視光カメラ、モーション カメラ、高精度慣性航法技術、および高性能計算を高度に統合することにより、スキャンをより簡単かつ便利 に行う事が出来る様になりました。 UAVで撮影した画像と組み合わせれば、より高緻密なモデルを取得することもできます。
リアルタイムソリューション
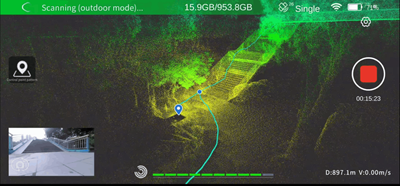
操作アプリにより、点群の取得状況をリアルタイムで確認できます。
スキャンが終了した時点で、粗い点群(フル点群の25%、色付きは3~10%)が生成されます。
土量計算など、粗い点群で充分な用途では、PCで後処理を行うことなく即座に点群の利用が可能です
ブレークポイントスキャン長時間継続作動
60分間の超長連続動作時間と強力なブレークポイントスキャン機能。大規模なシーンでも分割スキャンが不要、計測やデータ解析の効率を飛躍的に向上させます。
堅牢な設計と高い信頼性
高度なSLAMアルゴリズムを備えた LixelX1 は、廊下やトンネルなどの複雑なエリアの高精度点群を生成するために使用され、弱いテクスチャシーン マッピングの安定性が大幅に向上します。さらに、ソフトウェアソリューションを組み合わせることで、マルチソースデータの累積誤差を大幅に削減できます。
RTKモジュール(オプション)/ 360度パノラマカメラ

RTKモジュールを接続して、配信サービスから補正情報を受信することでネットワーク型RTKを行いながらスキャンします。 GNSS観測データは、スキャンデータと一緒にダウンロード、後処理ソフトを使用して点群の座標付けに使用することが可能です。
市販のパノラマカメラ(Insta360)が使用可能です。スキャン中、同時に録画しておいた動画を使用して点群のカラー化を行うことができます。
アタッチメント(オプション)

Lixel X1を背負ってスキャンすることを可能にするバックパックキット(右写真)の他、UAVに取り付ける「UAVアダプター」、自動車用の「カーキッットブラケット」を用意しています。
Lixel Studio (デスクトップソフトウェア)
リアルタイム3Dモデリング、表示、後処理のための強力でインテリジェントなソフトウェア。
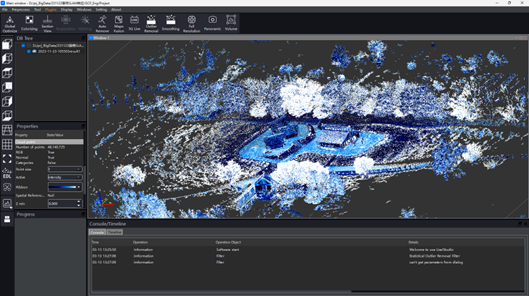
観測点群の後処理
Lixel X1よりダウンロードしたデータから、後処理によってフル点群を取得します。
スキャン中に現場内の既知点を登録することにより、点群の座標付けを行います。
オプションのRTKモジュールを使用すれば、GNSS観測データと統合して点群の座標付けが可能です。
360度パノラマカメラ(Insta360)で録画した動画と統合して、座標のカラー化を行うことができます。
フィルタリング機能
観測点群をより良い品質に向上させる多彩なフィルタリング機能を備えています。これらのツールによって移動体の除去・スムージング・異常値の除去等を行う事ができます。
編集・計算機能
点群の切り取りや結合などの編集機能や、土量計算や任意の断面を作成、距離等の計測機能を実装しています。